← Back to projects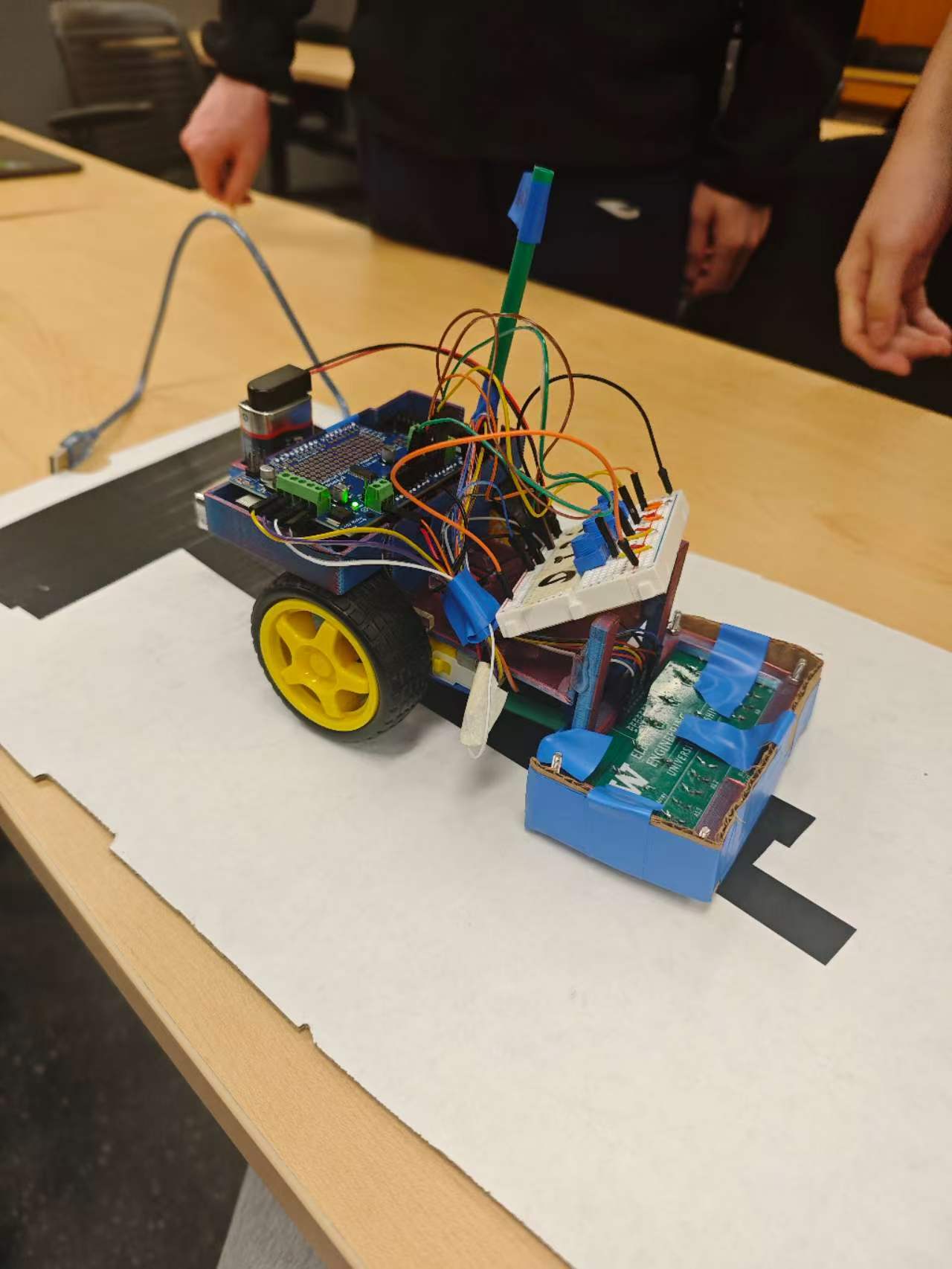
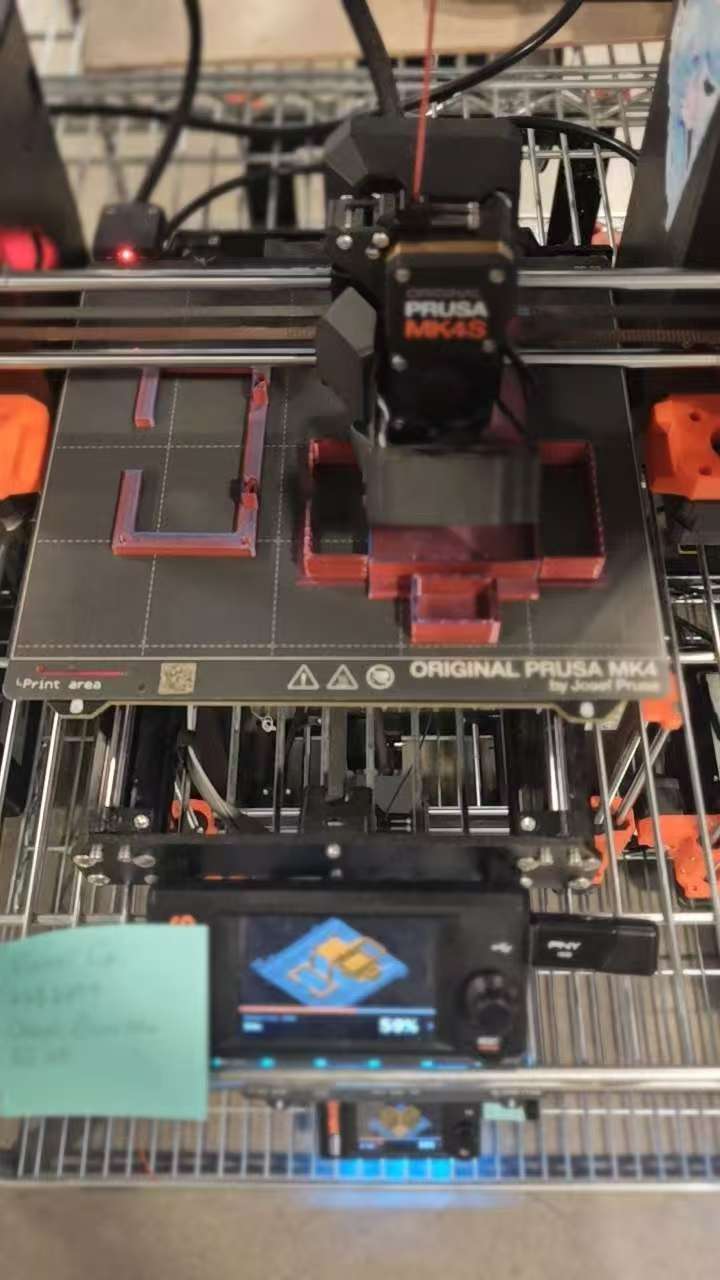
3d print 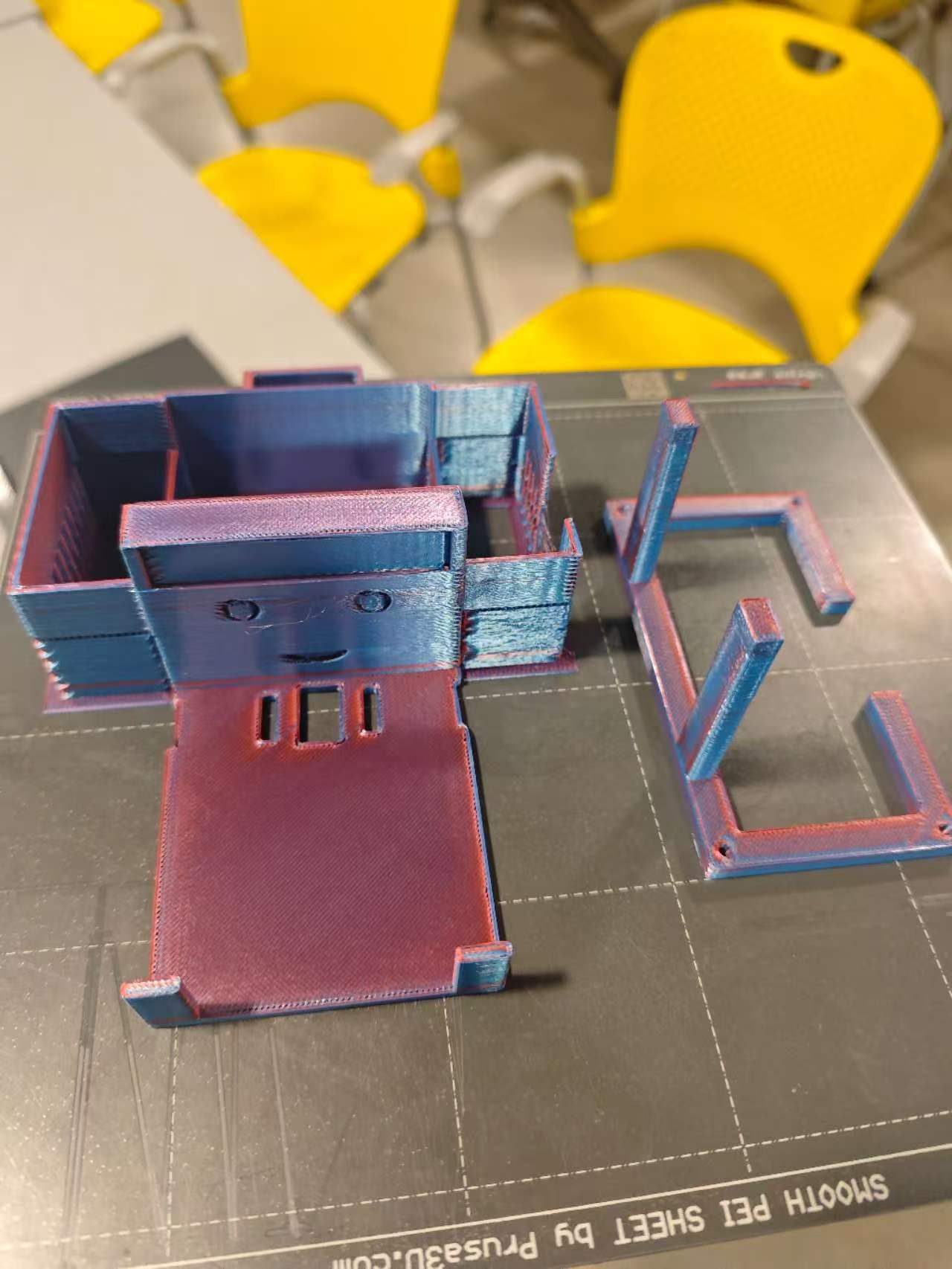
3d-print model 
group members
Embedded Systems / Robotics
Embedded Line-Following Robot System
Built an embedded line-following robot system involving sensor integration, PCB-level debugging, mechanical design, and control logic.
ArduinoPCB DesignFusion 360Sensors
Background / Motivation
The system connected physical sensing, control behavior, and mechanical reliability in one compact robot.
Problem Definition
Create a robot that reliably detects and follows a line while surviving real hardware imperfections.
Technical Approach
Integrated photoresistors and control logic, then tuned the robot through repeated hardware tests.
System Architecture / Design
Sensor inputs feed an Arduino controller, which drives motor decisions through calibrated thresholds.
Implementation Details
Designed mechanical parts in Fusion 360, assembled electronics, and debugged soldering and sensor issues.
Challenges and Solutions
- Photoresistor failure from soldering issues
- Noisy sensor readings
- Mechanical alignment
Results / Outcome
- Recovered system behavior through board-level diagnosis
- Improved testing discipline
- Built a working robot prototype
Reflection
The most valuable lesson was treating hardware debugging as a disciplined measurement process.
Gallery